
Abstract
Roadway construction and maintenance have become increasingly common as the U.S. transportation system ages and the population and traffic volume increase. This places more and more work zone workers near high-speed vehicles and increases the probability of being struck by them. This project innovatively deployed 360-degree LiDAR sensors at the roadside and tested their potential to provide work zone safety in terms of detection accuracy, efficiency, and ease of use. Researchers developed a set of algorithms to collect and interpret real-time information for each approaching vehicle and worker (e.g., location, speed, and direction) in and outside work zones using roadside LiDAR. Ultimately, the outcome of this pilot study could lead to developing a full-scale warning system deployable in a real work zone environment. Such a system could detect and analyze live traffic and work zone activity, activate the appropriate warning scheme, and deliver information to roadway workers in work zones in a timely manner so they can take evasive actions instead of relying on traditional “passive” safety countermeasures. This kind of panoramic, trajectory-level data for work zone actors can be used to develop a next-generation work zone situational awareness system.
Project Highlights
- Innovative Work Zone Safety Measures: The project deployed advanced 360-degree LiDAR sensors at roadside locations, focusing on improving work zone safety by providing advancing vehicle intrusion alerts.
- Real-time Data for Proactive Work Zone Safety: Sophisticated algorithms were developed to process real-time data from vehicles and workers, enabling the creation of a comprehensive warning system that empowers on-site personnel to take timely evasive actions.
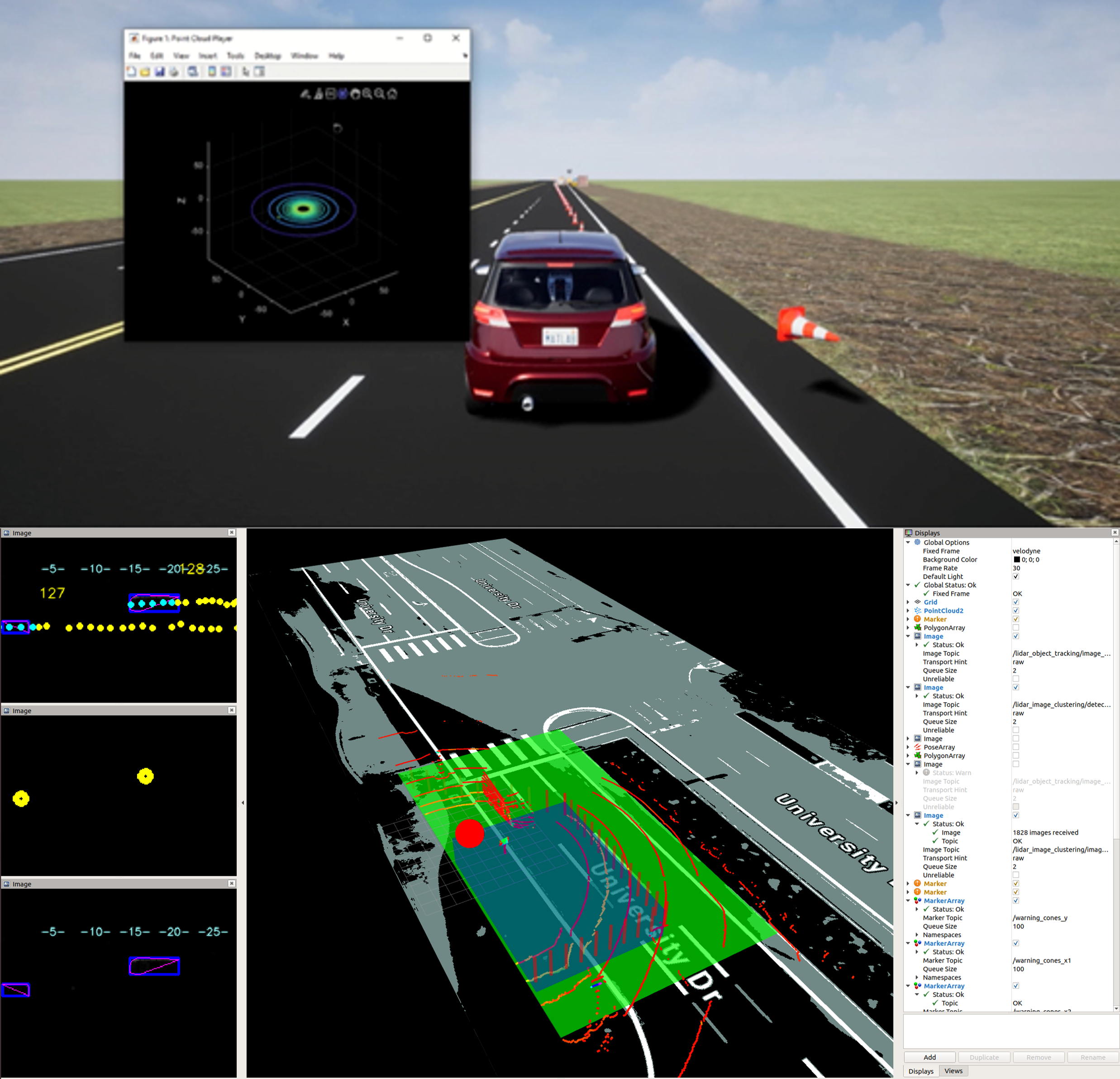
- Simulation of Smart Work Zone: This project built a 3D virtual environment to enable testing of roadside LiDAR applications and hence significantly reduces the amount of required road tests in the real-world.
- Foundation for Future Work Zone Safety Systems: By collecting trajectory-level data on work zone stakeholders, the project has established the groundwork for a cutting-edge work zone situational awareness system, showcasing the feasibility of a roadside LiDAR-based safety solution.
Final Report
EWD & T2 Products
Darwesh, Amir A (2021). LiDAR Based Object Detection and Tracking in Stationary Applications. Master’s thesis, Texas A&M University. Available electronically from https : / /hdl .handle .net /1969 .1 /196109.
Student Impact Statement(pdf): Four students from Texas A&M University worked on/received funding under this project (Tianchen Huang, a PhD student in the Department of Landscape Architecture & Urban Planning, Amir Darwesh, a Masters student in the Department of Mechanical Engineering, Lance Abler, an Undergraduate student in the Department of Mechanical Engineering and Michael Mpwo, an Undergraduate student in the Department of Electrical & Computer Engineering). This file contains a statement by Tianchen Huang and Michael Mpwo as to the impact this project had on education and workforce development.
Presentations/Publications
Wu, D., Darwesh, A., Le, M., & Saripalli, S. (2022). Simulation of Roadside LiDAR Applications: A Smart Work Zone Case Study. Transportation Research Board 101st Annual Meeting Transportation Research Board, Issue TRBAM-22-02381. Retrieved from [https://trid.trb.org/view/1996312]
Darwesh, A., Wu, D., Le, M., & Saripalli, S. (2021, September). Building a smart work zone using roadside lidar. In 2021 IEEE International Intelligent Transportation Systems Conference (ITSC) (pp. 2602-2609). IEEE. Retrieved from [https://ieeexplore.ieee.org/abstract/document/9564527]
The 2021 TexITE Webinar Series – ITS, TSMO and Big Data, 8/27/2021, Online, Audience: Industry professionals and Academic Researchers, https://texite.org/webinars2021/
The 2022 IEEE Sensors Conference, 10/30-11/2, 2022, Dallas, Texas, Audience: Industry professionals and Academic Researchers, https://2022.ieee-sensorsconference.org/
The 2023 ASCE International Conference on Transportation & Development (ICTD), Austin, Texas, Audience: Industry professionals and Academic Researchers, https://ascelibrary.org/doi/book/10.1061/ictd2023
Final Dataset
The final datasets for this project are located in the Safe-D Collection on the VTTI Dataverse; DOI: 10.15787/VTT1/KUTAZD.
Research Investigators (PI*)
Jason (Dayong) Wu (TTI/TAMU)*
Minh Le (TTI/TAMU)*
Gerald (Jerry) Ullman (TTI/TAMU)
Srikanth Saripalli (TTI/TAMU)
Tianchen Huang (TTI/TAMU-Student)
Amir Darwesh (TTI/TAMU-Student)
Project Information
Start Date: 2020-05-01
End Date: 2023-06-30
Status: Complete
Grant Number: 69A3551747115
Total Funding: $234,975
Source Organization: Safe-D National UTC
Project Number: TTI-05-03
Safe-D Theme Areas
Safe-D Application Areas
Vulnerable Users
Risk Assessment
Infrastructure Technology
WorkZone
LiDar
More Information
Sponsor Organization
Office of the Assistant Secretary for Research and Technology
University Transportation Centers Program
Department of Transportation
Washington, DC 20590 United States
Performing Organization
Texas A&M University
Texas A&M Transportation Institute
3135 TAMU College Station, Texas 77843-3135
USA