
Abstract
The project will focus on the development and evaluation of an augmented reality interface integrated into a dynamic HMI intended to increase situational awareness of the driving system and environment. Users will experience the enhanced HMI system in a transit-like, automated vehicle across realistic scenarios while gauging situational awareness, response selection, response performance, and comfort. As a secondary focus, the project will explore different emergency stop mechanisms for the automated vehicle, of which the user has full control, in the event that there is a system failure in either the vehicle’s control or sensing mechanisms.
Project Highlights
- For this experiment, we developed an interesting protocol to increase realism by convincing participants that the ‘safety driver’ in the vehicle with them was actually another participant in the study.
- To our knowledge, this was the first study conducted at VTTI entirely without anyone in the driver’s seat of the research vehicle.
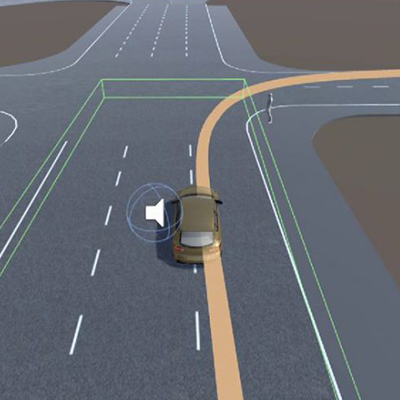
- Multiple HMIs were developed for this study to show participants what things the vehicle ‘saw’.
Final Report
EWD & T2 Products
Course Slides BMES 5984 Advanced Vehicle Safety Systems Research and Development (pptx): The project was used as a case study for ongoing advanced vehicle research on automated driving systems and the associated issues regarding the development of trust in systems safety for vehicle occupants.
Student Impact Statement – Alexis Basantis (pdf): This student working on this project provided an impact statement describing what the project allowed them to learn/do/practice and how it benefited their education.
Presentations/Publications
Basantis, A., Miller, M., Doerzaph, Z., Neurauter, L. (2019) “Assessing Alternative Approaches for Conveying Automated Vehicle ‘Intentions’”. Poster presented at the FAST-Zero Conference, Blacksburg, Virginia. September 11, 2019.
Basantis, A. (2019). Assessing Alternative Approaches for Conveying Automated Vehicle ‘Intentions’ (Master’s Thesis, Virginia Tech, Blacksburg, Virginia, USA). Retrieved from http://hdl.handle.net/10919/95219.
Basantis, A., Miller, M., Doerzaph, Z., Neurauter, L. (2019) “Assessing Alternative Approaches for Conveying Automated Vehicle ‘Intentions’”. Presented at the 2019 SBES Symposium, Blacksburg, Virginia. May 15, 2019.
Basantis, A., Miller, M., Doerzaph, Z., Neuratuter, L. (2019) “Assessing Alternative Approaches for Conveying Automated Vehicle ‘Intentions’”. Presented at the Torgersen Awards, Blacksburg, Virginia. May 7, 2019.
Basantis, A., Miller, D., Doerzaph, Z., Neurauter, L. (2018, May). Assessing Alternate Approaches for Conveying HAV ‘Intentions’. Poster presented at the SBES Annual Symposium, Winston-Salem, NC. (Published)
Final Dataset
The final datasets for this project are located in the Safe-D Collection on the VTTI Dataverse; DOI: 10.15787/VTT1/Z5DZAJ.
Research Investigators (PI*)
Zachary Doerzaph (VTTI/VT)*
Luke Neurauter (VTTI/VT)
Marty Miller (VTTI/VT)
Alexis Basantis (VTTI/VT)
Project Information
Start Date: 04/10/2018
End Date: 02/04/2020
Status: Complete
Grant Number: 69A3551747115
Total Funding: $374,468
Source Organization: Safe-D National UTC
Project Number: 03-082
Safe-D Theme Areas
Automated Vehicles
Transportation as a Service
Safe-D Application Areas
Driver Factors and Interfaces
Operations and Design
Vehicle Technology
More Information
Sponsor Organization
Office of the Assistant Secretary for Research and Technology
University Transportation Centers Program
Department of Transportation
Washington, DC 20590 United States
Performing Organization
Virginia Polytechnic Institute and State University
Virginia Tech Transportation Institute
3500 Transportation Research Plaza
Blacksburg, Virginia 24061
USA