
Abstract
In general, modern autonomous vehicles are capable of tracking lanes effectively in normal operation; however, when emergencies occur, these vehicles (for example, Cadillac Super Cruise CT6 and Tesla Model S) simply stop in the lane, creating safety problems for themselves and other vehicles. The proposed research is to enable the vehicle to navigate autonomously to stop out of the travel path of following vehicles. To realize this Autonomous Emergency Navigation, the vehicle will perform the following steps: perceive the surrounding environment and road conditions, identify a safe roadside location to stop outside the lane, specify a trajectory, and apply proper steering and braking to autonomously drive the vehicle to the safe location. This project draws on the complementary expertise of each research team member. The project PI recently developed state-of-the-art road surface measurement technologies. These advances, when combined with Simultaneous Localization and Mapping (SLAM), provide an accurate, rich, three-dimensional road profile within a 15-25m radius. Faculty expertise in robotics and feedback control are essential to autonomously navigate the vehicle along complex trajectories. For the recommended project initiation, we will develop and integrate technologies to self-localize the vehicle and perceive its environments including the road first in this project. The research carried out in this project will enhance traffic safety of automated vehicle systems when road emergencies take place. Furthermore, as each PI works closely with students, education and workforce development activities will prepare a new generation of students and enthusiasts from the public on the design and deployment of self-driving cars.
Project Highlights
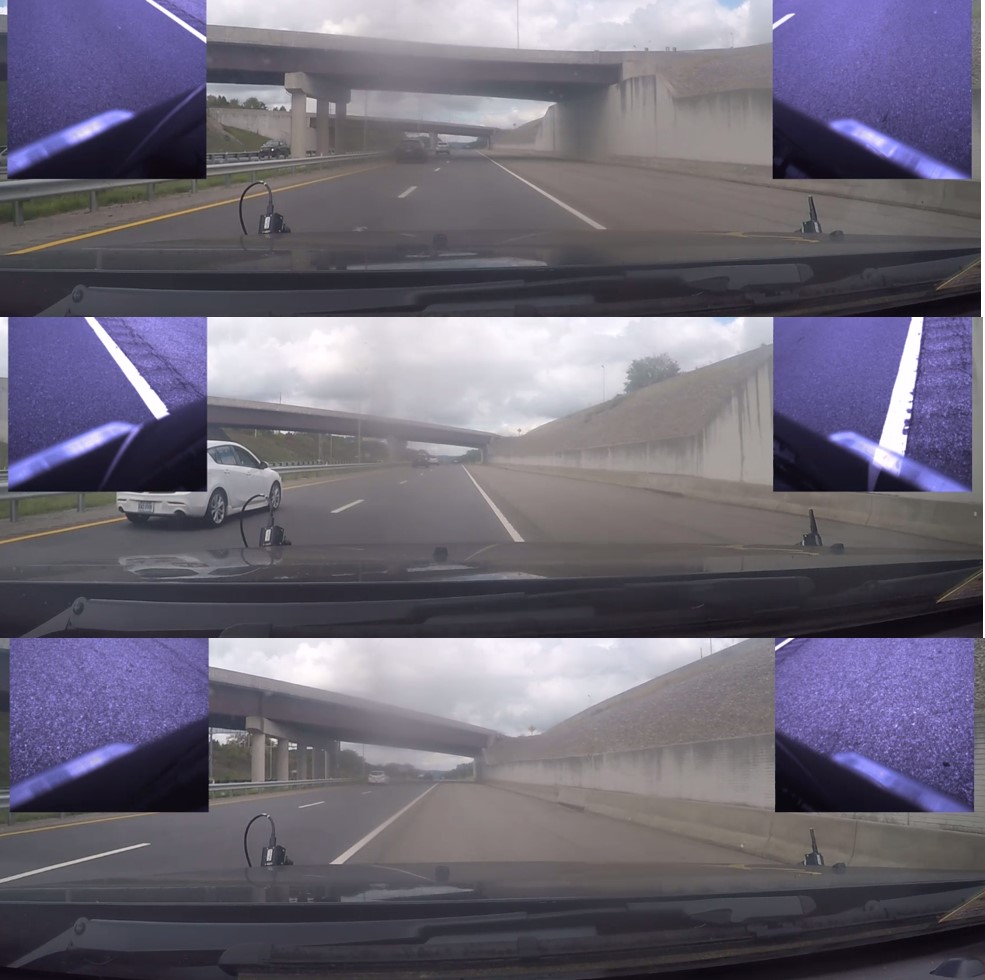
- Sensor-fusion based roadside perception module was developed that features accurate perception on roads with clear barrier boundaries.
- The developed autonomous control solutions that enable a vehicle to robustly navigate to the roadside despite imperfect perceptions and computation delays.
Final Report
EWD & T2 Products
Course modules: autonomous sensing of drivable road areas (ME 5524 Bayesian robotics)
Student Impact Statements – Lisheng Yang & Zhengdao Jiao : The student(s) working on this project provided an impact statement describing what the project allowed them to learn/do/practice and how it benefited their education.
SAE WCX 2019, Detroit, April 11th, 2019, a presentation of our experimental vehicle in the 2019 WCX Connected Vehicle Challenge by Lisheng Yang
This project retrofitted a vehicle with autonomous sensing and control capabilities. A picture of the test vehicle can be found here.
{kind=link}
Students were asked to re-implement the developed sensor-fusion techniques in this project on small-scale UGVs in a mock-up environment.
5th International Symposium on Future Active Safety Technology toward Zero Accidents (FAST-zero 19) was held at Inn at Virginia Tech and Skelton Conference Center on September 4-6, 2019. The conference was used as an opportunity to showcase the autonomous vehicles and capabilities developed for the Safe-D project. The autonomous vehicles include the Ford Escape Hybrid, which was equipped with a Velodyne 64-beam LiDAR, four PointGray Chameleon 3 cameras, NovTel GPS/IMU to enable the detection of roadsides and obstacles. The autonomous detection capability was demonstrated at the conference by bringing the vehicle and displaying sensor readings on the large monitor. For autonomous driving, ClubCar golf carts were brought into the conference site. Because they were placed indoors, they were lifted on jacks. The carts show the computer-controlled velocity and steering control, and the control includes not only the steering, throttle but also the brake, which is essential for the Safe-D project.
The Final Competition of the Connected Vehicle Challenge of SAE WCX 2019 was held in COBO Hall, Detroit, at noon on April 11, 2019. During the pitch-style presentation, information of our retrofitted autonomous vehicle developed in the Safe-D project was disseminated to automobile industry participants, for the sake of attracting potential industry stakeholders.
Presentations/Publications
Yang, L., Furukawa, T., Zuo, L., Parker, R., Doerzaph(2019). Estimation of Roadside for Autonomous Emergency Stop. In Proceedings of Fifth International Symposium on Future Active Safety Technology: Toward zero traffic accidents (FAST-zero), Blacksburg, VA, USA.(Accepted)
Yang, L., Furukawa, T., Zuo, L., & Doerzaph, Z. (2020, October). Control design for automated vehicle emergency safe stop system based on differential dynamic programming. ASME 2020 Dynamics System and Control Conference. American Society of Mechanical Engineers Digital Collection
Research Investigators (PI*)
Tomonari Furukawa (VT)*
Lei Zuo (VT)
Robert Parker (VT)
Zac Doerzaph (VTTI/VT)
Project Information
Start Date: 01/15/2018
End Date: 09/30/2019
Status: Complete
Grant Number: 69A3551747115
Total Funding: $171,758
Source Organization: Safe-D National UTC
Project Number: 03-073
Safe-D Theme Areas
Safe-D Application Areas
Planning for Safety
Vehicle Technology
More Information
Sponsor Organization
Office of the Assistant Secretary for Research and Technology
University Transportation Centers Program
Department of Transportation
Washington, DC 20590 United States
Performing Organization
Virginia Polytechnic Institute and State University
Virginia Tech Transportation Institute
3500 Transportation Research Plaza
Blacksburg, Virginia 24061
USA