
Alternative Title
Assessment of Work Zone Pre-Crash Scenarios Using Crowdsourced Data
Abstract
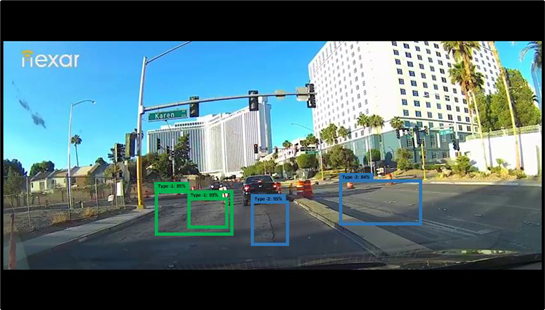
Pavements play a vital role in the transportation infrastructure in the United States. Damage to public road transportation infrastructure causes roadways to fail to perform as intended and increases crash risks. Road damage must be detected quickly and accurately in order to maintain roads and effectively allocate repair money. In this study, four deep-learning object detection models were used for detecting five types of pavement damages using Nexar Dashcam images. The single-shot multi-box detector (SSD) and faster region-based convolutional neural networks (Faster R-CNN) object detection models using MobileNet and Inception techniques were applied to the selected and processed images. An attempt was made to detect alligator cracking, longitudinal cracking, transverse cracking, and patching on the roadway surface using the developed model. A total number of 6,326 images with a total number of 8,970 damage instances were selected from the provided data. Faster R-CNN models showed higher recall and precision compared to the SSD models. Faster R-CNN Inception Resnet showed the highest average precision of 56%, followed by Faster R-CNN Inception with an average precision of 50%. Recall values showed almost the same trend as precision. Faster R-CNN showed the highest average recall of 43%. The results showed that Type-I and Type-II damages were detected with the highest recall and precision compared to other damages. Type-I damage was detected with an average precision of 81% and recall of 70 % in all of the models.
Project Highlights
- Dashcam images were used to develop deep learning (DL) models to detect pavement distress.
- Five major pavement damage types: (Type I) Alligator Cracking, (Type Longitudinal Cracking), (Type III) Transverse Cracking, (Type IV) Patching, and (Type V) Potholes were identified in images.
- Two object detection models—single shot multi-box detector (SSD) Inception V2 and faster region-based convolutional neural networks (R-CNN) Inception V2 from TensorFlow object detection API—were applied to identify the pavement distress types.
- The developed models can be used in real-time damage detection models that can be implemented in Dashcam video cameras and improve drivers’ safety.
Final Report
EWD & T2 Products
Student Impact Statement (pdf): One student was funded under this project (Mahmood Tabesh from TAMU). This file contains a statement of the impact this project made on the students’ education and workforce development.
Presentations/Publications
A Journal article titled “Detecting Pavement Distresses using crowdsourced dashcam imagery data” was submitted to the Journal of Transportation Research Record to be presented at the TRB annual meeting that will take place in January 2022.
Final Dataset
Data used in this study will be publicly available after the research team obtains permission from Nexar Inc
Research Investigators (PI*)
Bahar Dadashova (TTI/TAMU)*TAMU)
Chiara Silvestri Dobrovolny (TTI/TAMU)
Mahmood Tabesh (TTI/TAMU-Student)
Project Information
Start Date: 08/20/2020
End Date: 05/15/2021
Status: Complete
Grant Number: 69A3551747115
Total Funding: $39,100
Source Organization: Safe-D National UTC
Project Number: TTI-Student-07
Safe-D Theme Areas
Automated Vehicles
Big Data Analytics
Safe-D Application Areas
Risk Assessment
Driver Factors and Influences
Planning for Safety
Vehicle Technology
More Information
Sponsor Organization
Office of the Assistant Secretary for Research and Technology
University Transportation Centers Program
Department of Transportation
Washington, DC 20590 United States
Performing Organization
Texas A&M University
Texas A&M Transportation Institute
3135 TAMU
College Station, Texas 77843-3135
USA